产品详情

发布时间:2026-07-03 09:37:45

苏州凯士卡智能科技有限公司带你了解江苏ai智能测温机器人报价相关信息,观众展厅展馆内路,带游前往目的地。咨询答观展常见题解答,随时提供咨询服务。将展厅展馆教育的题知识库定期导入智能平台,在机器人后台管理系统储存。咨询人通过描述自己遇到的题,机器人可以对题进行分析并生成推送相应的答案。特色讲解设定多条特色观展路线,游参观边走讲说,展品定点生动讲解。迎宾机器人整体设计思路按照人性化的思路,主要应用了语音识别技术、图像识别技术、电机控制技术、计算机通信技术、单片机应用技术、机械设计技术、材料成型技术,涉及到信息、机械、材料、美学等多学科迎宾机器人系统包括四个子模块语言交互,图像虚拟人,舞蹈运动以及传感器
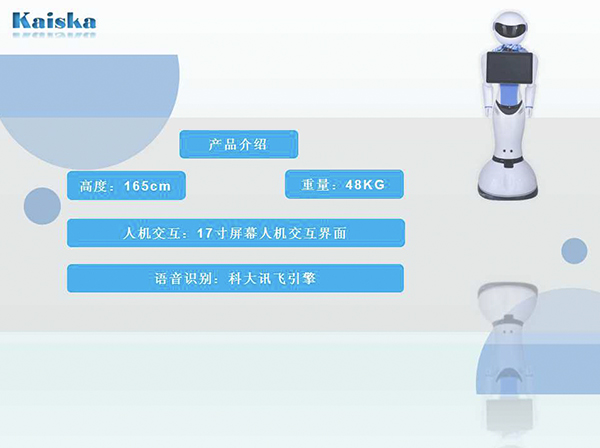
江苏ai智能测温机器人报价,在机器人走向智能的道路上,视觉是机器人重要的感官系统,没有之一。视觉,譬如摄像机或LiDAR,不仅能提供对环境的多方位数据(颜色、距离、物体、连接性等等),而且与我们常说的人工智能具备无缝连接。目前绝大多数的AI场景实现,都是针对视觉展开的。迎宾机器人是集语音识别技术和智能运动技术于一身的高科技展品,该机器人为仿人型,身高、体形、表情等都力争逼真,亲切、可爱、美丽、大方、栩栩如生,给人以真切之感,体现人性化。简介机器人外形设计具有卡通形象特征,主要包括头部、颈部、胳膊、躯体和底部行走机构。头部具有摄像机,可以对人员进行人脸跟踪。胳膊包括大臂、小臂和手,其中大臂和小臂可自由转动,完成摆手、握手等功能。底部行走部分能够完成机器人的前进、后退、左转和右转,完成机器人的行走功能。(可根据用户需要进行定制)
巡检机器人哪个牌子好,一般认为,按照机器人从低级到的发展程度,可以把机器人分为三代。一代机器人。即工业机器人,主要指能以“示教—再现”方式工作的机器人。其本体是一类似于人的上肢功能的机械手臂,末端是手爪等操作机构。它通过操作人员“手把手”的示教,或者通过离线编程存储的动作顺序信息完成作业。如果外界条件发生变化,或者机器人工作内容需要改变,通过人对其程序做相应改变,因此它不具备智能。我们从广泛意义上理解所谓的智能机器人,它给人的深刻的印象是一个的进行自我控制的“活物”。其实,这个自控“活物”的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。由此也可知,智能机器人至少要具备三个要素感觉要素,反应要素和思考要素。

对运动要素来说,智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。
苏州凯士卡智能科技有限公司带你了解江苏ai智能测温机器人报价相关信息,观众展厅展馆内路,带游前往目的地。咨询答观展常见题解答,随时提供咨询服务。将展厅展馆教育的题知识库定期导入智能平台,在机器人后台管理系统储存。咨询人通过描述自己遇到的题,机器人可以对题进行分析并生成推送相应的答案。特色讲解设定多条特色观展路线,游参观边走讲说,展品定点生动讲解。迎宾机器人整体设计思路按照人性化的思路,主要应用了语音识别技术、图像识别技术、电机控制技术、计算机通信技术、单片机应用技术、机械设计技术、材料成型技术,涉及到信息、机械、材料、美学等多学科迎宾机器人系统包括四个子模块语言交互,图像虚拟人,舞蹈运动以及传感器
江苏ai智能测温机器人报价,在机器人走向智能的道路上,视觉是机器人重要的感官系统,没有之一。视觉,譬如摄像机或LiDAR,不仅能提供对环境的多方位数据(颜色、距离、物体、连接性等等),而且与我们常说的人工智能具备无缝连接。目前绝大多数的AI场景实现,都是针对视觉展开的。迎宾机器人是集语音识别技术和智能运动技术于一身的高科技展品,该机器人为仿人型,身高、体形、表情等都力争逼真,亲切、可爱、美丽、大方、栩栩如生,给人以真切之感,体现人性化。简介机器人外形设计具有卡通形象特征,主要包括头部、颈部、胳膊、躯体和底部行走机构。头部具有摄像机,可以对人员进行人脸跟踪。胳膊包括大臂、小臂和手,其中大臂和小臂可自由转动,完成摆手、握手等功能。底部行走部分能够完成机器人的前进、后退、左转和右转,完成机器人的行走功能。(可根据用户需要进行定制)
巡检机器人哪个牌子好,一般认为,按照机器人从低级到的发展程度,可以把机器人分为三代。一代机器人。即工业机器人,主要指能以“示教—再现”方式工作的机器人。其本体是一类似于人的上肢功能的机械手臂,末端是手爪等操作机构。它通过操作人员“手把手”的示教,或者通过离线编程存储的动作顺序信息完成作业。如果外界条件发生变化,或者机器人工作内容需要改变,通过人对其程序做相应改变,因此它不具备智能。我们从广泛意义上理解所谓的智能机器人,它给人的深刻的印象是一个的进行自我控制的“活物”。其实,这个自控“活物”的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。由此也可知,智能机器人至少要具备三个要素感觉要素,反应要素和思考要素。
对运动要素来说,智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。







